技術紹介
超音波モーターの歩みを支える
新生工業製超音波モータが持つ小型・低速・高トルク・高静粛、非通電時の高保持力という特徴は小型の駆動装置のアクチュエータとして最適です。
ラインナップとして一般環境で利用することを想定してコストを抑えた標準型モデル、高磁場環境での利用を想定した非磁性型モデルをご用意しています。
超音波モータは電磁型モータと比べ、トルク-重量比が優れており、ロボット用アームなど、多数のモータを必要とする装置の小型化・軽量化にも有効です。近年ではMRI装置付近など高磁場環境で利用できるモータとして弊社製非磁性型モータは非常に注目されており、医療機器向け組み込み用アクチュエータとして活躍しています。また、真空での高速回転が可能な新型モータとして、高出力型静電モータの開発を進めています。
超音波モータとは

初期の超音波モータ:USR-60-4-100
1986年12月25日、駆動力にコイルやマグネットによる電磁力を一切利用しない、全く新しい駆動原理のモータとして超音波モータが新生工業から発売されました。
製品名はUSR-60-4-100、現在の超音波モータ:USRシリーズの原型となるモータです。
超音波モータは圧電セラミックに電圧を加えたときの変形を利用して回転します。その電圧の周波数が人の可聴音域(20kHz以下)を超えていることから”超音波”モータと命名されました。
その後、新生工業製超音波モータ:USRシリーズは改良を積み重ね、機能性、信頼性の向上を目指してきました。その技術の結晶が、直径30mmのUSR30シリーズ、直径60mmのUSR60シリーズです。
これまでの努力の結果、USRシリーズは世界中の多くの企業や学術機関で採用され、超音波モータのデファクトスタンダードとして高い評価を得ています。
現在はUSR30シリーズ、USR60シリーズ共に一般環境における利用を想定した標準型モータ、高磁場環境における利用を想定した非磁性型モータを製造、販売しています。
超音波モータ:USRシリーズの構造と動作原理
超音波モータ:USRシリーズの構造
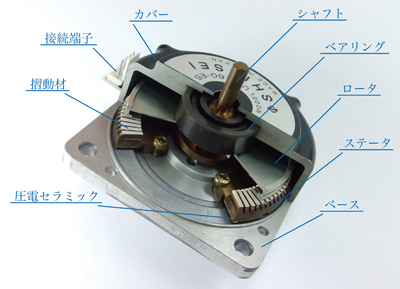
超音波モータ:USR60シリーズの構造
超音波モータ:USRシリーズの構造
- ステータ部
- ロータ
- シャフト
- ベアリング
超音波モータ:USRシリーズは大きく分けて振動を伝達するステータ部、回転部であるロータ、モータに力を伝達するシャフト、軸受けとしてのベアリングの4つで構成されています。
ステータ部の構成
- 圧電セラミック
- ステータ金属
- 摺動材
ステータ部は、振動を発生する圧電セラミック、振動を増幅させるステータ金属、ロータと接触する摺動材で構成されています。
特徴
- 安定した回転性能
- 大きな保持力
- 高い静粛性
非常にシンプルな構造ですが、個々の要素が厳密に計算され、安定した回転性能、大きな保持力、高い静粛性を実現しています。
標準型モータ、非磁性型モータ共に電磁波を発生する部材は利用していません。
非磁性型モータはステータ金属、ベアリングに磁気の影響を全く受けない素材を利用することで、高磁場環境内での安定動作を実現しています。
超音波モータ: USRシリーズの動作原理
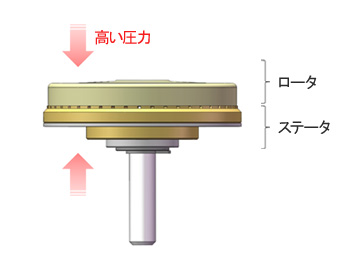
ロータ、ステータに印加される力のイメージ
-
概略
超音波モータは、圧電セラミックに電圧を掛ける事で圧電セラミックを変形させ、その変形がステータ金属で増幅・伝搬されることによりステータ金属の表面が波状に変形します。この波の頂点は進行波として移動し、ステータと接しているロータを摩擦力によって回転させます。
超音波モータの高い保持力
ロータとステータ間は高い圧力が加わっているため、停止時の最も大きな摩擦力は超音波モータの保持力となります。
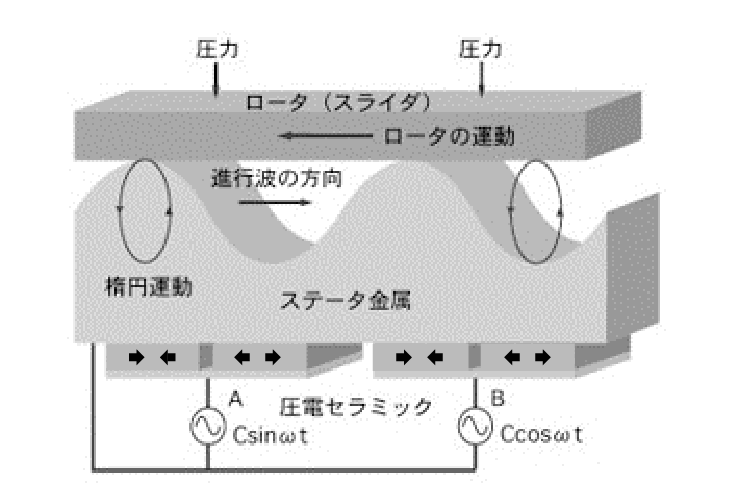
ロータの回転原理イメージ
-
超音波モータの回転原理
圧電セラミックに電圧を印加させることで、圧電セラミックを変形・ゆがませ、その変形がステータ金属で増幅・伝搬されることによりステータ金属の表面に進行波を発生させます。
ここで、ステータ金属は表面の進行波の各頂点だけでロータに接触しており、その各頂点は楕円運動します。
ロータは、その楕円運動の影響を受けて回転します。この楕円運動の軌跡は、進行波の進む方向とは逆方向であり、その影響を受けたロータも進行波と逆方向に回転します。
つまり、 ステータの円周上を右回り(CW)に進行波が進む時、ロータに接触した進行波の各頂点には、左回り(CCW)の楕円運動が生じます。
そして、その波の頂点と接触しているロータは楕円運動と同じ方向、左回り(CCW)に回転します。この進行波の速度と向きを制御することで、CW、CCW方向の切り替えが可能であり、超音波モータの高い応答性を実現しています。
超音波モータ:USRシリーズの特徴
新生工業製超音波モータ:USRシリーズは、小型・低速・高トルクであり、応答性、静粛性に優れています。また、非通電時の高い保持力を有するため、ギアなどの減速機なしに総重量を抑えた可動部を構築することが可能です。
超音波モータは駆動力にコイルやマグネットによる電磁力を利用しておらず、磁気などの影響を受けません。
また、回転時に磁気を発生することもないため、MRI付近や超伝導実験設備などの強磁場環境内で安心して利用することが動作可能です。
現在、超音波モータは、多彩な用途に利用されています。
| ・カメラのオートフォーカス | ・計測器の制御部 |
| ・光学機器のレンズミラーの駆動部 | ・人工衛星からの信号を受信する装置の位置決め |
| ・工業用ロボット用のチャッキング装置 | ・ロールスクリーンの自動制御装置 |
| ・部品の搬送用送り装置 | ・MRI内の計測器の姿勢制御 |
| ・高磁場環境内のアクチュエータ |
代表的な特徴
低速、高トルク
超音波モータは、毎分数10〜数100回転の低速で高トルクであることが特徴です。
ギアなどの減速機構を必要とせず、ダイレクトドライブが可能であるため、バックラッシュゼロの可動部を構築することが可能です。
無通電時の高い保持力
超音波モータは電源を切った状態で摩擦力による高保持力を維持します。
このため、超音波モータにはブレーキやクラッチが必要なく、電磁ブレーキやクラッチのない軽量なシステムを構築することが可能です。
高応答性および高制御性
ロータのイナーシャ(慣性)が小さく、ロータ・ステータ間の摩擦による制動力が大きいため、停止時に優れた応答性を発揮します。
速度コントロールも無段階であり、機械的時定数も1[ms]以下と、制御性にも大変優れています。
このため、高精度な速度制御および位置制御が可能です。
磁気の影響を受けず、電磁波を発しない
巻き線や磁石を利用しないため、超音波モータは電磁波を発生しません。
特に、非磁性タイプの超音波モーターは、磁性材料を一切使用しないので高磁場環境で磁気の影響を受けずに安定動作します。
小型で薄く、軽量
同程度のトルクを持つ電磁力を利用したモータに比べ、小型で薄く、重量は数分の1です。
多関節ロボットの腕や足のアクチュエータとして利用することで、各関節の重量を軽くすることが可能です。
このため、ロボットやシステム全体としての応答性の向上や可搬重量の向上が期待できます。
静粛性に優れる
駆動に利用する振動は非可聴領域の周波数であるため、作動音がきわめて静かです。
また、ギアを使わないことで、駆動装置のノイズの発生を避けることも可能です。